
In this 4th installment of Making an R2-D2, we are adding the dome motor, the electronic brain, adding hinged panels, and syncing the remote control.
1. Install Dome Motor
In order to get Artoo’s head to spin, we will use the lazy susan we installed in a previous step. To get the large bearing to spin remotely, Josh cut a large circular gear rack and a smaller cog to turn it. The larger rack fit onto the lazy susan’s mounting hardware while the smaller cog and an accompanying bracket were attached to a small 12v DC motor. Once secured inside the body cavity, I could control the voltage to the motor and Artoo’s head was spinning! Now this feature will eventually be controlled through a wiring harness attached to a slip ring and connected to a control board. The slip ring prevents the wiring from getting twisted up inside the dome.

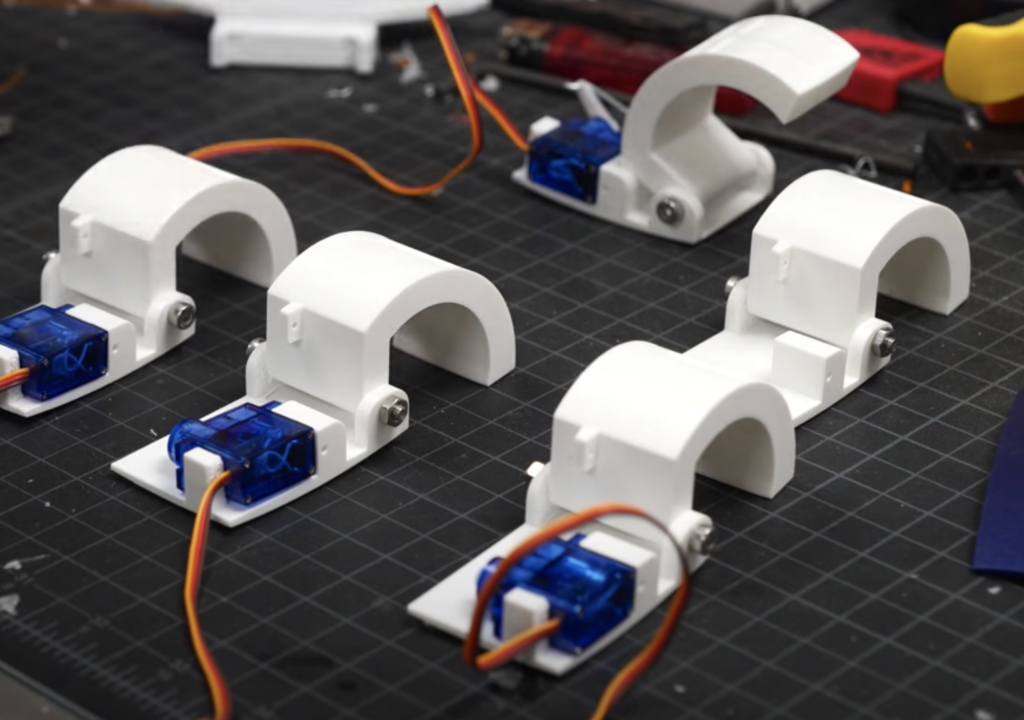
2. Print New Panel Hinges
First let me say, these hinges so far, have been the hardest part of this entire build. I bought the two-piece hinges that the astromech.net forums recommended but I could not get them to consistently work. The problem with Artoo’s hinged panels is that the dome panels are concave and sit at an angle. That means the a properly working hinge must be able to push the panel outward and clear the two-layer thick dome. The recommended hinges weren’t working and I struggled to find a suitable replacement. Someone recommended that I use a 3d-printable hinge set that came with the files for a mounting template. I was so happy when the first one worked perfectly. I printed a whole bunch of them and mounted all of the body and dome panels!
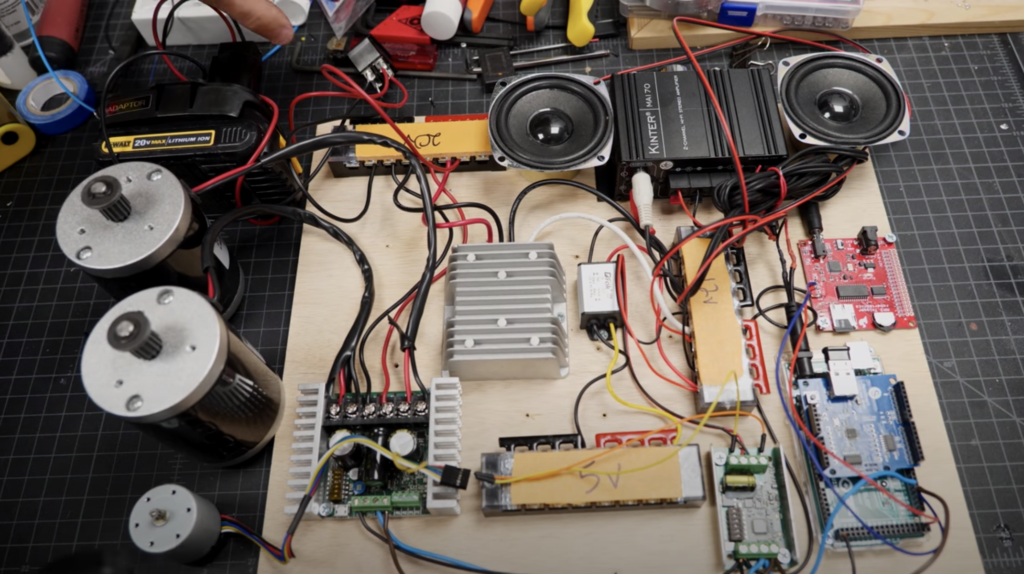
3. Connect the Electronic Brain
The electronic system for this droid is, surprise, complex. I’m sure I could eventually figure out how to do it all from scratch, but that is silly talk and totally unnecessary when a group of accomplished builders made it easy. Members on the astromech.net forums created a control system called “Shadow” which uses a single 18v battery to power the entire droid. There are systems that use 18v, 12v, and 5v so I had to connect several microcontrollers through volts regulators to power each subsystem. The Shadow’s Arduino sketch helps control all the different motors, the servos, load different sounds. It also has the bluetooth connectivity to a Playstation controller.
But Bob, He Still Needs Feet!
I know. I’m working on it. The feet, while not technically complex, are the most robust part of the droid because they take the most abuse. I am making them out of thicker aluminum so its taking longer.I wouldn’t have been able to any of this project without the amazing help of the builders on astromech.net. I’ll have certain pieces linked in this article, but I got all of the guidance, parts list, and specialty items from members in those forums. If you are interested at all in making your own R2-D2, go check them out.
Tools List:
(purchasing via these affiliate links supports ILTMS)
3d Printing/CNC/Laser:
- Avid 5’x5′ Pro CNC
- Ultimaker 2 Extended 3D printer
- Ultimaker 3
- Original Prusa i3 MK 3
- Silhouette Portrait (vinyl cutter)
- All filaments, 3d printing supplies from MatterHackers
Electronics:
- Arduino Uno (just the Uno)
- Arduino Uno Kit
- Arcade buttons
- Raspberry Pi 3
- Multimeter
- Wire
- jumpers (Male to Female)
- Soldering iron
- Third hand kit
- Wire strippers (not the ones I have, but good ones)
- Thin solder
- Anti static mat
- Fiskars cutting mat
- Plastic parts cabinet (24 drawer)
- Plastic parts cabinet (64 drawer)
- Precision Screw driver kit
Other Stuff: